



ZEMAX軟件技術應用專題:用於數位元投影光學中均勻照明的陣列透鏡 (蒼蠅眼) 
後表面可以是平面、球面、圓錐面、多項式非球面或環形表面。這使得陣列中透鏡元件表面形狀的定義和優化具有了極大的靈活性。下圖顯示了透鏡陣列1物體,它是由7 x 5個矩形透鏡組成的透鏡陣列,每個矩形透鏡都可以看作一個球面透鏡的矩形區域。其它可以用於該應用程式的物體包括透鏡陣列2物件和六邊形透鏡陣列(Hexagonal Lenslet Array)物件。
2002
w**elab86_Swsp ??? 3年前
Ansys Zemax光學設計軟件技術教程:眼科鏡片設計 
透鏡參數在光學設計上常使用的最小化Seidel斜向像散的方法可透過在OpticStudio的評價函數中加入ASTI操作數達成目的,此時我們將目標值設為0、加大權重,並且使用單一波長。在縮小遠點球面上最小模糊圈的方面,我們可以透過OpticStudio的預設優化函數和光點半徑標準等功能達成目的。
2212
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術應用專題:如何在OpticStudio中設計DOE透鏡或超穎透鏡 
或者,參考文獻[3]顯示了如何使用Lumerical FDTD軟體為給定的相位曲線設計超穎透鏡。這種方法的缺點是設計人員可能無法檢查整個系統的性能。例如,沒有辦法考慮所有繞射階數來檢查點擴展函數(PSF)。類似地,儘管可以追蹤“非有效”的順序光線,但沒有計算出繞射效率,因此沒有辦法知道雜散光路中的功率比。
2189
w**elab86_Swsp ??? 3年前
[VirtualLab] 非球面透鏡后焦點研究 ![[VirtualLab] 非球面透鏡后焦點研究](https://q4.itc.cn/images01/20260415/4678c13ce58f49d0983b0f3844e7ac33.png)
焦平面研究焦點區域研究(無像散)焦點區域研究(無像散)文檔信息拓展閱讀? 物鏡對像散激光二極管光束的準直? 激光束在高數值孔徑球面焦點區域的模擬? 通用探測器
694
信光嗎 ??? 1月前
VirtualLab:非球面透鏡后焦點研究 
在本案例中,激光二極管首先用物鏡準直,然后用非球面透鏡聚焦,并在Virtualab Fusion中研究了焦點區域的光場的演化。與沒有像散的情況相比,可以清楚地展示像散對其焦點區域的光場影響。 建模任務 非球面鏡和準直物鏡 透鏡系統元件允許簡單地定義一個由光滑表面和均勻的、各向同性的介質的交替排列組成的元件。
2068
追光ing ??? 3年前
VirtualLab Fusion:非球面透鏡后焦點研究 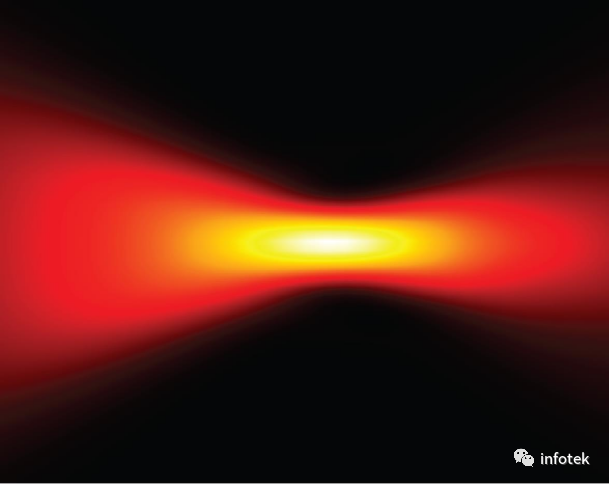
焦平面研究焦點區域研究(無像散)焦點區域研究(無像散)文檔信息 拓展閱讀? 物鏡對像散激光二極管光束的準直? 激光束在高數值孔徑球面焦點區域的模擬? 通用探測器
2282
追光ing ??? 1年前
ZEMAX軟件技術應用專題:智慧型手機鏡頭模組 
智慧型手機鏡頭模組用於智慧型手機相機的鏡頭模組非常複雜,每個模組都包含多個鏡頭元件。追求更好的成像性能,加上需要模組盡可能小以增強手機的美感,需要復雜的設計形式。透鏡的形狀通常是高度非球面的。注塑成型塑料通常用於以低成本大批量生產此類鏡片。設計需求智慧型手機鏡頭通常必須在寬視野和低 f 值下工作。隨著手機變得更薄,軌道總長度通常小於 5 毫米。
2042
w**elab86_Swsp ??? 3年前
【VirtualLab運用】通過使用錐透鏡對生成貝塞爾光束以優化焦斑大小和焦深 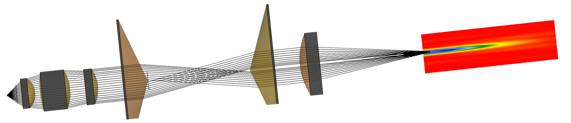
規格:非球面聚焦透鏡從目錄的非球面標簽下選擇一個平凸非球面透鏡。
2679
追光ing ??? 1年前
VirtualLab Fusion:使用非球面透鏡對激光掃描系統進行性能分析 
很明顯,相比于F-Tan(θ)特性,非球面透鏡能夠更好的校正F-Theta。這是由于相比于球面透鏡,非球面透鏡進行部分像差校正。 分析軸上的光束剖面 入射角到非球面透鏡是0°。為了更準確的評估焦點光斑,使用幾何場追跡(Geometric Field Tracing )和焦區域探測器(Focal Region Detector)分析光束剖面。
2424
追光ing ??? 3年前
VirtualLab運用:使用非球面透鏡對激光掃描系統進行性能分析 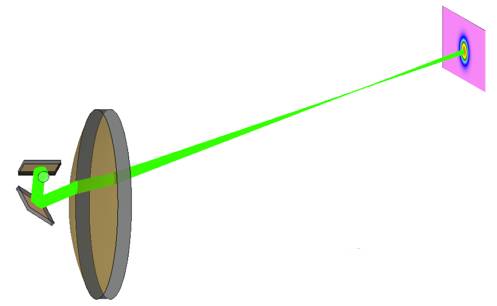
很明顯,相比于F-Tan(θ)特性,非球面透鏡能夠更好的校正F-Theta。這是由于相比于球面透鏡,非球面透鏡進行部分像差校正。 分析軸上的光束剖面 入射角到非球面透鏡是0°。為了更準確的評估焦點光斑,使用幾何場追跡(Geometric Field Tracing )和焦區域探測器(Focal Region Detector)分析光束剖面。
2296
追光ing ??? 1年前
VirtualLab運用:使用非球面透鏡對激光掃描系統進行性能分析
很明顯,相比于F-Tan(θ)特性,非球面透鏡能夠更好的校正F-Theta。這是由于相比于球面透鏡,非球面透鏡進行部分像差校正。 分析軸上的光束剖面 入射角到非球面透鏡是0°。為了更準確的評估焦點光斑,使用幾何場追跡(Geometric Field Tracing )和焦區域探測器(Focal Region Detector)分析光束剖面。
2341
追光ing ??? 1年前
[VirtualLab] 非球面透鏡的聚焦點研究 ![[VirtualLab] 非球面透鏡的聚焦點研究](https://img.jishulink.com/202512/attachment/cf4a2807fd6046da933f50037d2521c0.png?image_process=resize,fw_294,fh_172,)
例如,激光二極管首先由物鏡準直,然后由非球面聚焦,在VirtualLab中研究了鏡頭聚焦區域的演化。與沒有像散的情況相比,清楚地呈現了像散對聚焦區域的影響。
1047
信光嗎 ??? 5月前
VirtualLab運用:基于SLM光束整形系統中光學系統像差的研究 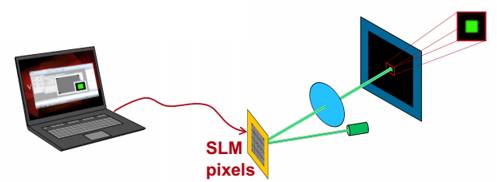
關于使用VirtualLab進行透鏡優化的更多信息參考示例BDS.0003 7.結果:非球面透鏡 ?生成期望的高帽光束形狀。?不僅如此,轉換效率(90.8%)和信噪比都非常好。?非球面透鏡以幾乎零像差將SLM函數轉換成高帽光束。 8.總結基于采用傅里葉光學的SLM光束整形系統的性能研究。
2280
追光ing ??? 1年前
VirtualLab:非球面透鏡背后的焦點研究 
此案例在VirtualLab Fusion中研究了激光二極管首先被物鏡準直,然后被非球面透鏡聚焦后焦點區域的場的演變。與沒有散光的情況相比,散光對其焦點區域的場的影響被清楚地呈現出來。 建模任務 非球面鏡和準直物鏡 Lens System Component允許輕松定義一個由光滑表面和均勻、各向同性的介質交替排列組成的組件。
1945
追光ing ??? 3年前
[VirtualLab] 不同像差的焦點 ![[VirtualLab] 不同像差的焦點](https://img.jishulink.com/msimage/202511/ad2e90ec18c9de35aacdd89d1a4d162e.png?image_process=resize,fw_294,fh_172,)
文件信息 進一步閱讀-具有矩形孔徑的系統的先進PSF和MTF計算-高NA非球面焦點區域的激光模擬
886
信光嗎 ??? 6月前
VirtualLab運用:激光束傳輸系統設計——超越光線追跡 
光束傳輸系統(BDS.0002v.1.0)非球面后焦點的研究1.系統介紹?光源—具有發散角的紅外激光二極管?組件—準直折射透鏡系統及非球面聚焦?探測器—點列圖—波前差—聚焦區域的1維和2維探究—光束參數?建模/設計—光線追跡:最初焦點位置檢測。
2515
追光ing ??? 1年前
非球面透鏡背后的焦點研究 
此案例在VirtualLab Fusion中研究了激光二極管首先被物鏡準直,然后被非球面透鏡聚焦后焦點區域的場的演變。與沒有散光的情況相比,散光對其焦點區域的場的影響被清楚地呈現出來。建模任務 非球面鏡和準直物鏡Lens System Component允許輕松定義一個由光滑表面和均勻、各向同性的介質交替排列組成的組件。
2240
追光ing ??? 1年前
非球面透鏡背后的焦點研究
此案例在VirtualLab Fusion中研究了激光二極管首先被物鏡準直,然后被非球面透鏡聚焦后焦點區域的場的演變。與沒有散光的情況相比,散光對其焦點區域的場的影響被清楚地呈現出來。建模任務 非球面鏡和準直物鏡Lens System Component允許輕松定義一個由光滑表面和均勻、各向同性的介質交替排列組成的組件。
2212
追光ing ??? 1年前
非球面透鏡背后的焦點研究
此案例在VirtualLab Fusion中研究了激光二極管首先被物鏡準直,然后被非球面透鏡聚焦后焦點區域的場的演變。與沒有散光的情況相比,散光對其焦點區域的場的影響被清楚地呈現出來。建模任務 非球面鏡和準直物鏡Lens System Component允許輕松定義一個由光滑表面和均勻、各向同性的介質交替排列組成的組件。
2220
追光ing ??? 1年前
非球面透鏡背后的焦點研究
此案例在VirtualLab Fusion中研究了激光二極管首先被物鏡準直,然后被非球面透鏡聚焦后焦點區域的場的演變。與沒有散光的情況相比,散光對其焦點區域的場的影響被清楚地呈現出來。建模任務 非球面鏡和準直物鏡Lens System Component允許輕松定義一個由光滑表面和均勻、各向同性的介質交替排列組成的組件。
2255
追光ing ??? 1年前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
